
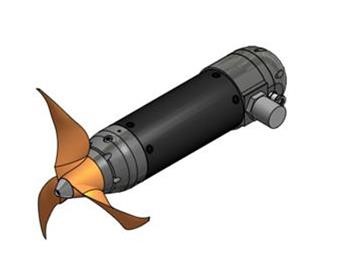
High Efficiency Marine Thruster
Inventors: Carl Kaiser and Andrew Billings
Publication No. WO2015200557 A1
Overview: Thrusters are used as the principle form of propulsion and maneuverability for submersible vehicles and are often powered by electric motors. Mission profiles for these autonomous undersea vehicles (AUVs) and remotely operated vehicles (ROVs) will often include both high velocity operations and low velocity station keeping. Since space and weight capacity may place constraints on allowable battery size, high end-to-end efficiency is desired, however, existing thrusters are optimized over limited vehicle velocities and tend to have narrow efficiency peaks that constrain vehicle motion options.
Technology: This high efficiency, low noise signature thruster maintains a flat efficiency curve to accommodate both high velocity and station keeping requirements. End-to-end efficiencies of greater than 40% at low power and 30% at high power are achieved at velocity ranges from 0.1 meters per second to greater than 1.5 meters per second. This thruster utilizes recent advances in motor winding technology, and the electric motor is enclosed within a waterproof, oil-filled housing attached by an integrated drive shaft to the outer surface of the thruster through multiple high grade bearings and seals. The result is a durable design that is efficient and has a low noise signature. Off-the-shelf motor controllers allow operators to take continuous advantage of rapid improvements in the motor controller industry. Offering proven performance through field testing, this thruster is meant for use on any aquatic vehicle (preferably submersibles), and are rated for use at depths of up to 11,000 m.