
Underwater Vehicle Tethering
Inventor: Andrew Bowen, Louis Whitcomb, Dana R. Yoerger, Robert McCabe
Publication No. US7621229 B2
 Overview: Existing robotic deep submergence vehicle systems have excellent capabilities and provide critical, routine access to the seafloor primarily in ranges up to 6,500 m. These systems utilize tether systems (attached to surface vehicles such as ships) that generally prevent full operation of devices at depths of past 7,000 m or so. This steel cable tether is limited by the weight of the cable that increases substantially with increasing length of cable. At one point the weight of the cable begins to exert a force on the support ship that is well past the allowable limits. As these tethers are often made of Kevlar, they are very expensive and have limited lifetimes.
Overview: Existing robotic deep submergence vehicle systems have excellent capabilities and provide critical, routine access to the seafloor primarily in ranges up to 6,500 m. These systems utilize tether systems (attached to surface vehicles such as ships) that generally prevent full operation of devices at depths of past 7,000 m or so. This steel cable tether is limited by the weight of the cable that increases substantially with increasing length of cable. At one point the weight of the cable begins to exert a force on the support ship that is well past the allowable limits. As these tethers are often made of Kevlar, they are very expensive and have limited lifetimes.
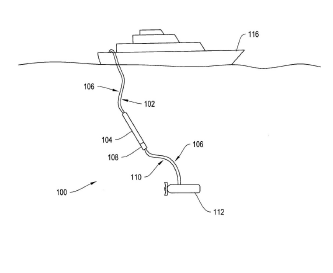
Technology: This tethering system for underwater vehicles uses a low strength optical fiber tether capable of securing vehicles to greater depths and for extended periods of time. The tether system includes a mechanical fuse that prevents a high load from acting on and severing the tether that is attached to the underwater vehicle, thus allowing use of far smaller, lightweight cables than typically used. Upon separation of the fuse, a cable payout system pays out an optical fiber that keeps the underwater vehicle, typically a robotic craft, in communication with the surface vessel. The relatively light weight glass fiber may be reinforced and extended to lengths greater than 40 km allowing deep-sea exploration at depths up to 11,000m.
CONTACT
To learn more about this opportunity please contact:
The Office for Technology Transfer
- Email: techtransfer@whoi.edu
- Phone: (508) 289-3447
Additional Resources
Intellectual Property
"Systems and methods for tethering underwater vehicles" US7621229 B2