
Doppler Shift Navigation for AUV Swarming
Inventors: Erin Fischell, Nicholas Rypkema, Henrik Schmidt
Publication No. US20190204430A1
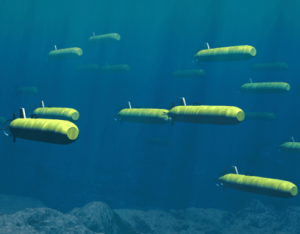
Swarm Intelligence is a collective behavior composed of many individuals that coordinate using decentralized control and self-organization - typically used in aircrafts and drones because of the access to GPS, high data rates, and low-cost hardware. Unfortunately, integration into underwater swarming intelligence has stagnated due to limited GPS, Wi-Fi, expensive navigation, and low data rate communications.
Technology: An underwater, doppler-based acoustic navigation system uses a single hydrophone and at least one acoustic source to enable multiple AUVs to follow the acoustic source at relative positions. Additional acoustic sources further promote complex following patterns and precision. The system employs a “leader” AUV with an acoustic beacon and “follower” AUVs. The followers navigate by the Doppler Effect; a higher pitch indicates the correct direction, and a lower pitch informs the AUVs that they need to redirect. The Doppler Shift Navigation System expands underwater robotics intelligence. With integration designed for low-cost AUVs, creating swarms widens the range of scientific and commercial operations.
CONTACT
To learn more about this opportunity please contact:
The Office for Technology Transfer
- Email: techtransfer@whoi.edu
- Phone: (508) 289-3447
Additional Resources
Intellectual Property
- “Doppler Shift Navigation System and Method of Using Same”
Pending - “Submerged Vehicle Localization System and Method”
US20190204430A1
Pending - “Device, System and Method of Adaptive Autonomy with Sensor Swarming”
Pending
Related Technologies
- Doppler Beamforming
- Transcouters