
Ocean Robotics & Underwater Communications
Underwater Optical Communications
These Underwater Optical Communications provide a reconfigurable, long-range, optical modem-based underwater communication network. In particular, the network provides low power, low cost, and easy to deploy underwater optical communication system capable of being operated at long distances.
Multi-Carrier Underwater Acoustic Communications
The Multi-Carrier Underwater Acoustic Communication System uses a two-step approach to mitigate frequency-dependent Doppler drifts for zero-padded OFDM transmissions over fast-varying channels. The system is based on block-by-block processing and does not rely on channel dependence across OFDM blocks. Thus, the system is applicable for fast-varying UWA channels.
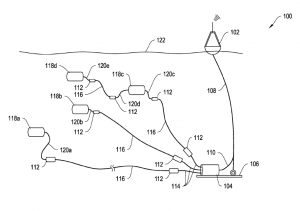
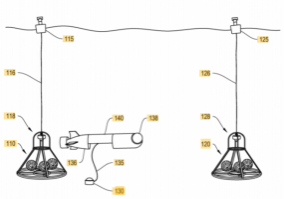
Long Range Fiber Optic Data Communications
The system includes a cabled ocean observatory deployed underwater and connected to a surface buoy. The fiber optic extension modules can be permanently attached to each end of the fiber optic cables and include an optical transceiver, a power supply, and an inductive element for removably coupling an underwater sensor or the cabled ocean observatory to the fiber optic cable.

Dynamic Electric Motor
This technology is a novel Brushless DC (BLDC) motor system. The design is intended to decouple the torque constant from the speed constant in the BLDC motor system. This allows efficient torque and speed to be independent. The system couples two BLDC motors to a single shaft, with the first motor optimized for torque and coupled via a sprag bearing clutch. The second motor is optimized for speed and is directly coupled to the shaft. The outcome is a motor that is efficient over a large operating range
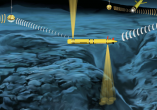
Doppler Shift Navigation
An underwater, doppler-based acoustic navigation system uses a single hydrophone and at least one acoustic source to enable multiple AUVs to follow the acoustic source at relative positions. Additional acoustic sources further promote complex following patterns and precision.